Stock Code: 831045
Industrial Automation & Intelligence Solutions
SUMMERY: باعتبارها جزءًا مهمًا من أتمتة اللحام الحديثة، تُستخدم قدرات اللحام الفعالة والدقيقة للذراع الآلي اللحام على نطاق واسع في العديد من المجالات مثل صناعة السيارات والفضاء وبناء السفن والصناعات الثقيلة. إن فهم الهيكل ووضع الحركة وآلية العمل ...
باعتبارها جزءًا مهمًا من أتمتة اللحام الحديثة، تُستخدم قدرات اللحام الفعالة والدقيقة للذراع الآلي اللحام على نطاق واسع في العديد من المجالات مثل صناعة السيارات والفضاء وبناء السفن والصناعات الثقيلة. إن فهم الهيكل ووضع الحركة وآلية العمل لذراع اللحام الآلي سيساعد على فهم إمكانات تطبيقه ومزاياه التقنية في الإنتاج الصناعي.
تتكون آلة لحام الذراع الروبوتية بشكل أساسي من عدة مكونات رئيسية، بما في ذلك:
الذراع الروبوتية: تتكون عادة من مفاصل متعددة، معظمها عبارة عن أذرع آلية ثلاثية المحاور وأذرع آلية ذات 6 محاور في السوق، والتي تتمتع بدرجات مختلفة من الحرية ويمكنها التحرك بمرونة في الفضاء ثلاثي الأبعاد. يستخدم تصميم الذراع الآلية بشكل عام سبائك الألومنيوم أو الفولاذ لضمان القوة والصلابة الكافية مع تقليل وزنها.
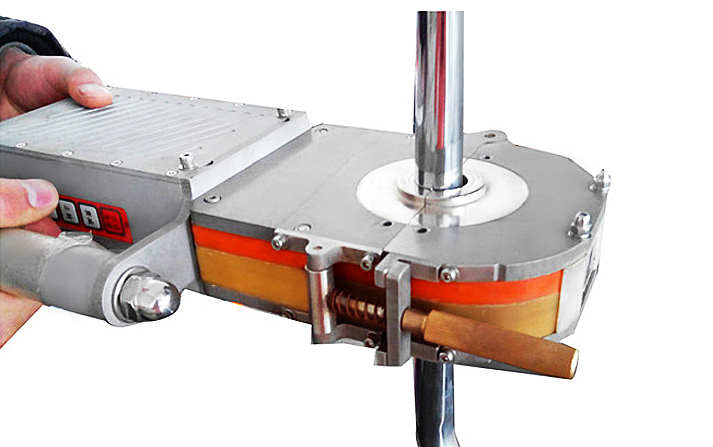
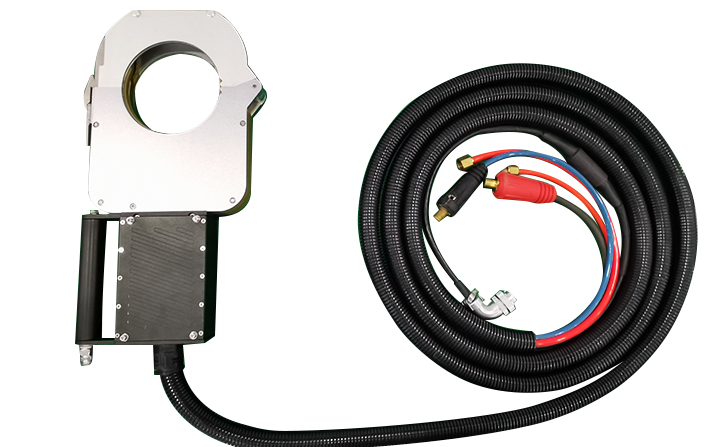
أدوات اللحام: بما في ذلك مسدسات اللحام والفوهات والأقطاب الكهربائية وغيرها، فهي مكونات أساسية في عملية اللحام. يعتمد اختيار أدوات اللحام على طريقة اللحام (مثل اللحام بالقوس واللحام بالليزر وغيرها) ونوع المادة.
نظام القيادة: يشمل بشكل أساسي المحركات والمخفضات وأجهزة النقل، وهي المسؤولة عن قيادة حركة الذراع الآلية. يمكن تقسيم المحركات إلى محركات مؤازرة ومحركات متدرجة تستخدم على نطاق واسع في روبوتات اللحام بسبب دقتها العالية واستجابتها العالية.
نظام التحكم: يتكون عادةً من PLC (وحدة التحكم المنطقية القابلة للبرمجة) أو الكمبيوتر الصناعي، المسؤول عن التحكم في الحركة وتخطيط المسار وتعديل معلمات اللحام لذراع الروبوت.
تشمل طرق حركة الذراع الروبوتية اللحام بشكل أساسي ما يلي:
الحركة الخطية: يمكن لذراع اللحام الآلي أن يتحرك على طول مسار مستقيم وهو مناسب لمهام اللحام البسيطة. على سبيل المثال، أثناء لحام الدرزات الطويلة المستقيمة، يمكن للحركة الخطية للذراع تحقيق لحام موحد.
الحركة الدورانية: من خلال دوران المفاصل، يمكن لذراع الروبوت أداء حركات دورانية معقدة في الفضاء للتكيف مع احتياجات اللحام في زوايا ومواضع مختلفة. تتيح طريقة الحركة هذه للروبوت العمل بمرونة في المساحات المعقدة ثلاثية الأبعاد، مما يجعله مناسبًا بشكل خاص للتطبيقات التي تتطلب لحامًا متعدد الزوايا.
الحركة المركبة: من خلال الجمع بين الحركة الخطية والدورانية، تكون أذرع روبوت اللحام قادرة على أداء مسارات لحام معقدة، مثل اللحامات المنحنية أو اللحامات الدائرية. يمكن لطريقة الحركة هذه أن تحسن بشكل كبير كفاءة اللحام وجودة اللحام.
تتضمن آلية عمل آلة لحام الذراع الروبوتية الخطوات الرئيسية التالية:
تخطيط المسار: قبل بدء اللحام، يقوم نظام التحكم بتخطيط المسار بناءً على متطلبات مهمة اللحام. يحتاج تخطيط المسار إلى مراعاة عوامل مثل شكل اللحام والموقع والسرعة وتسلسل اللحام.
التحكم في الحركة: بعد الانتهاء من تخطيط المسار، يتحكم نظام التحكم في نظام القيادة لدفع الذراع الروبوتية للتحرك وفقًا للمسار المحدد مسبقًا من خلال إصدار التعليمات. يتطلب التحكم في الحركة مراقبة في الوقت الحقيقي للموضع والسرعة أثناء عملية اللحام لضمان جودة اللحام.
عملية اللحام: أثناء عملية اللحام، تقوم أداة اللحام بتمرير تيار كهربائي إلى مادة اللحام، وصهر المعدن من خلال قوس أو طريقة تسخين أخرى، وتحقيق اللحام. يمكن لروبوت اللحام ضبط معلمات اللحام مثل التيار وسرعة اللحام وزاوية اللحام بناءً على ردود الفعل في الوقت الفعلي لتحسين تأثير اللحام.
المراقبة والتعليقات: تم تجهيز روبوت اللحام بأجهزة استشعار يمكنها مراقبة درجة الحرارة وحالة حوض السباحة المنصهر وجودة اللحام أثناء عملية اللحام في الوقت الفعلي. من خلال نظام التغذية الراجعة، يمكن للروبوت ضبط المعلمات تلقائيًا أثناء عملية اللحام لضمان استقرار اللحام واتساقه.
ختاماً
يحدد الهيكل ووضع الحركة وآلية العمل للذراع الروبوتية اللحام بشكل مشترك كفاءتها وموثوقيتها في الإنتاج الصناعي. من خلال التخطيط الدقيق للمسار والتحكم المرن في الحركة وعمليات اللحام الذكية، ستلعب ذراع اللحام الآلية دورًا أكبر في المزيد من المجالات وستوفر دعمًا قويًا لتطوير التصنيع الحديث.